Jake Tan
New Media Artist/
Creative Technologist
SELECTED
MR(AI)
Dancing the Algorithm
Archive of Digital Plants
Analogue Is Dead
ADAM
CHRONOLOGICAL ALL WORKS
2025
- AR Tango︎︎︎ Art Reimagined
- VR Latent Space Pluritopia
- In Hot Waters
- Terrarium︎︎︎ SG Night Festival
- BIOS: Digital Nature Night Festival
- BIOS: A Conversation with the Wind
- AR/VR SUPERMAMA World︎︎︎ Milan Design Week
- BIOS 01 SG Art Week
- Networked Machines︎︎︎ SG Art Week
2021
- Archive of Digital Plants
- Golden Hour︎︎︎ SG Countdown
- AR Secret Garden: Lloyd’s Inn X SERIAL︎︎︎
- AR Hidden Garden: Lloyd’s Inn X UNIQLO︎︎︎
- AR ADM Grad Show 2021︎︎︎
- Interconnected Machines SG Art Week
2020
- AR Lucinda Law’s Botanical Art Experience Exhibition︎︎︎
- The Divine Forest
- In Vivo: Within the Living
- Creating Smart Textiles
- AR Creators Climate Action AR Campaign︎︎︎
2019
- AR BBC Earth: Botanical Art World
- AR The Bubble Tea Factory: Bobabae
- VR AISTRONAUT NOISE FESTIVAL
- AR THE SHŌNEN SERIES
- 4th DIMENSION (2nd Edition) (1st Edition)
- State Of The Arch
- Share Share Application
2018
- Me & My Shiny Teeth Application
-
ADAM
- ONE
- TV?
-
BUDJAM
-
SOUNDFLOWER︎︎︎
- AR VoyagAR︎︎︎
- Shy Shy Venus︎︎︎
- VR Voice of The Morning Star︎︎︎
- PHASE︎︎︎
- AR TamaGO!︎︎︎
- ROGUE Magazine︎︎︎
2017
-
NOMADIC︎︎︎
-
VR Train To Bishan︎︎︎
- 36-100-01︎︎︎
- MEMBRAIN Industries︎︎︎
- VR 360 Tour of Prambanan︎︎︎
- To Us︎︎︎
- 兄 Blood︎︎︎
2016
2014
 ︎
︎ADAM
ADAM
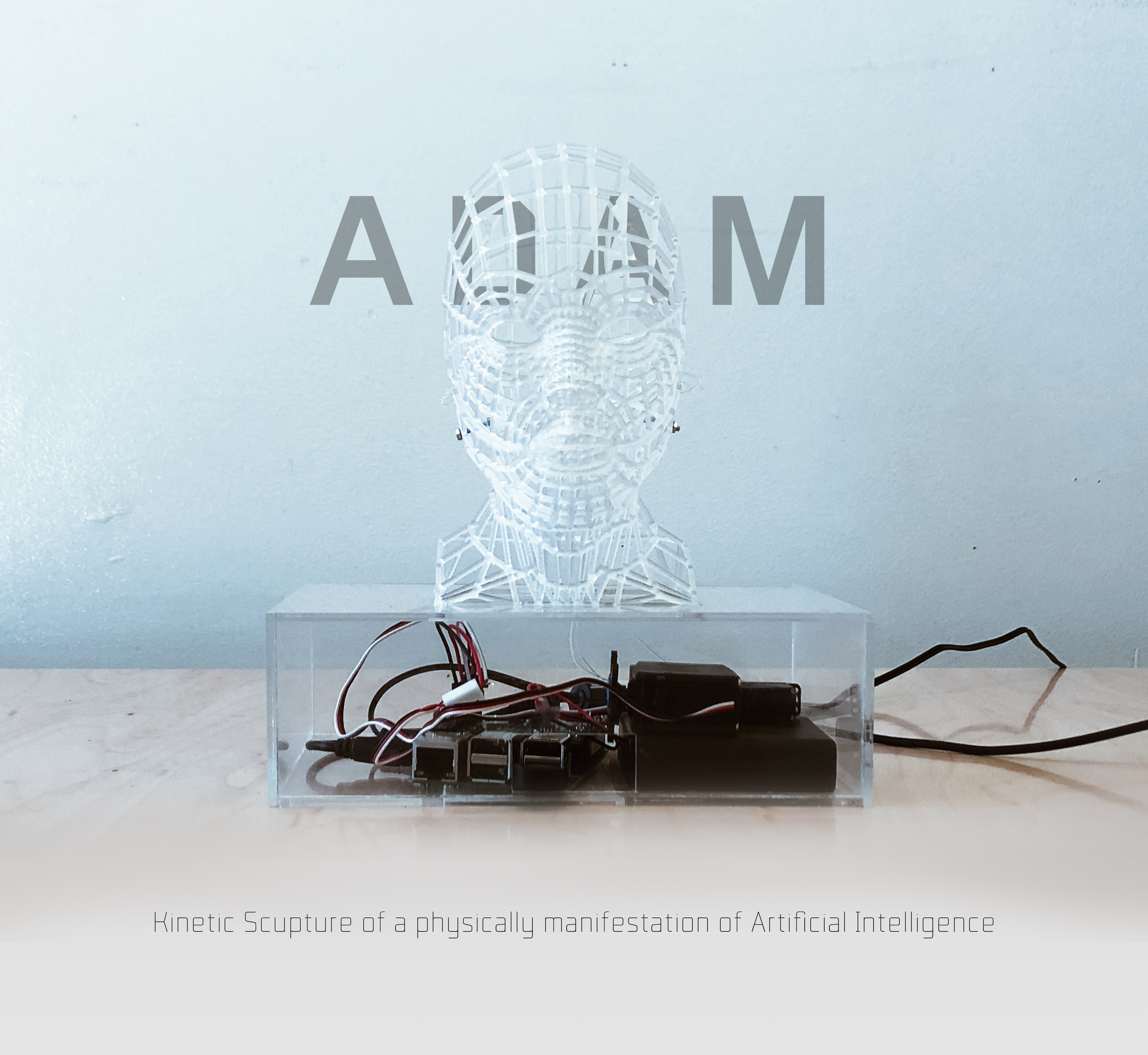
ADAM, Pronunciation: /aˈdam/, [aˈðãm], is a physical manifestation of Artificial Intelligence that challenges what, or rather, who we are talking to. Who is he if he exists beyond the virtuality?
ADAM is a fully 3D Printed Kinetic Sculpture and will consist of mechanism that will allow him to move. Alexa will be installed on a Raspberry Pi to control the audio networking aspect and that data will be referenced to create movement on the sculpture.
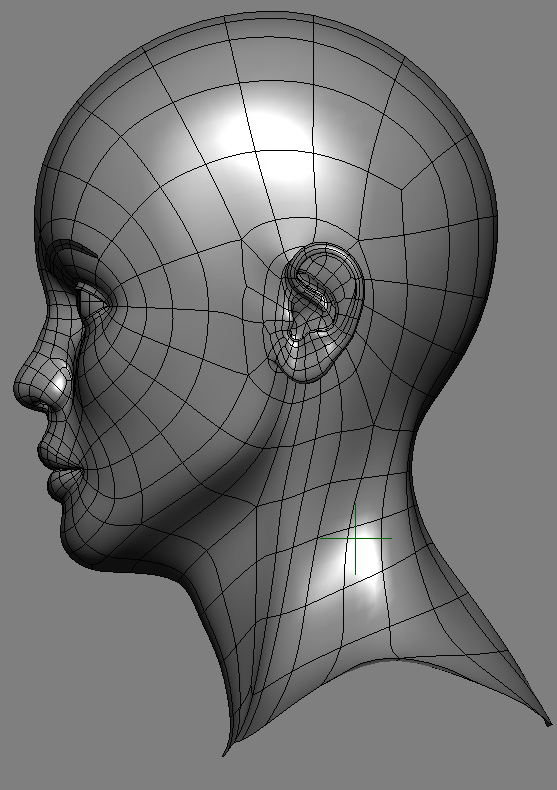
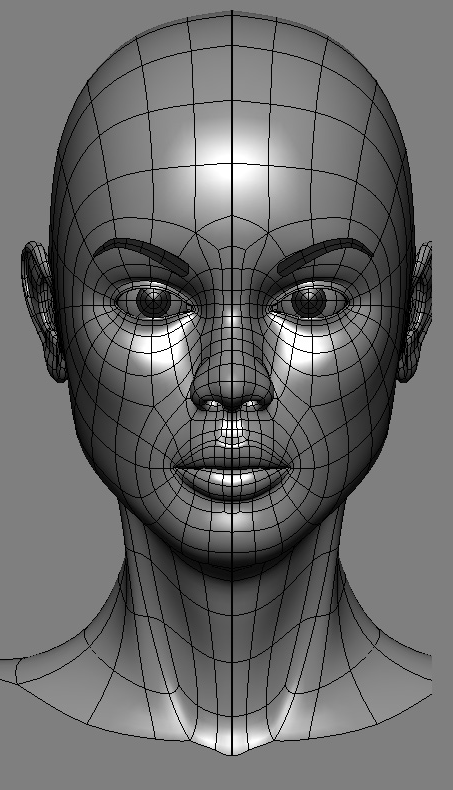
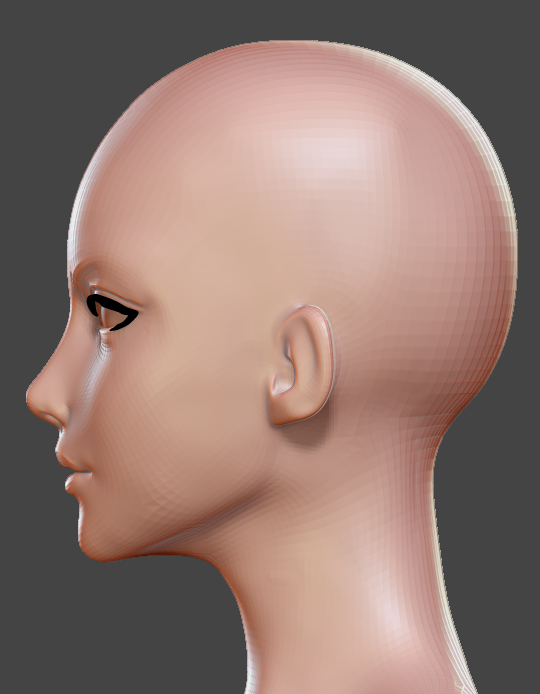
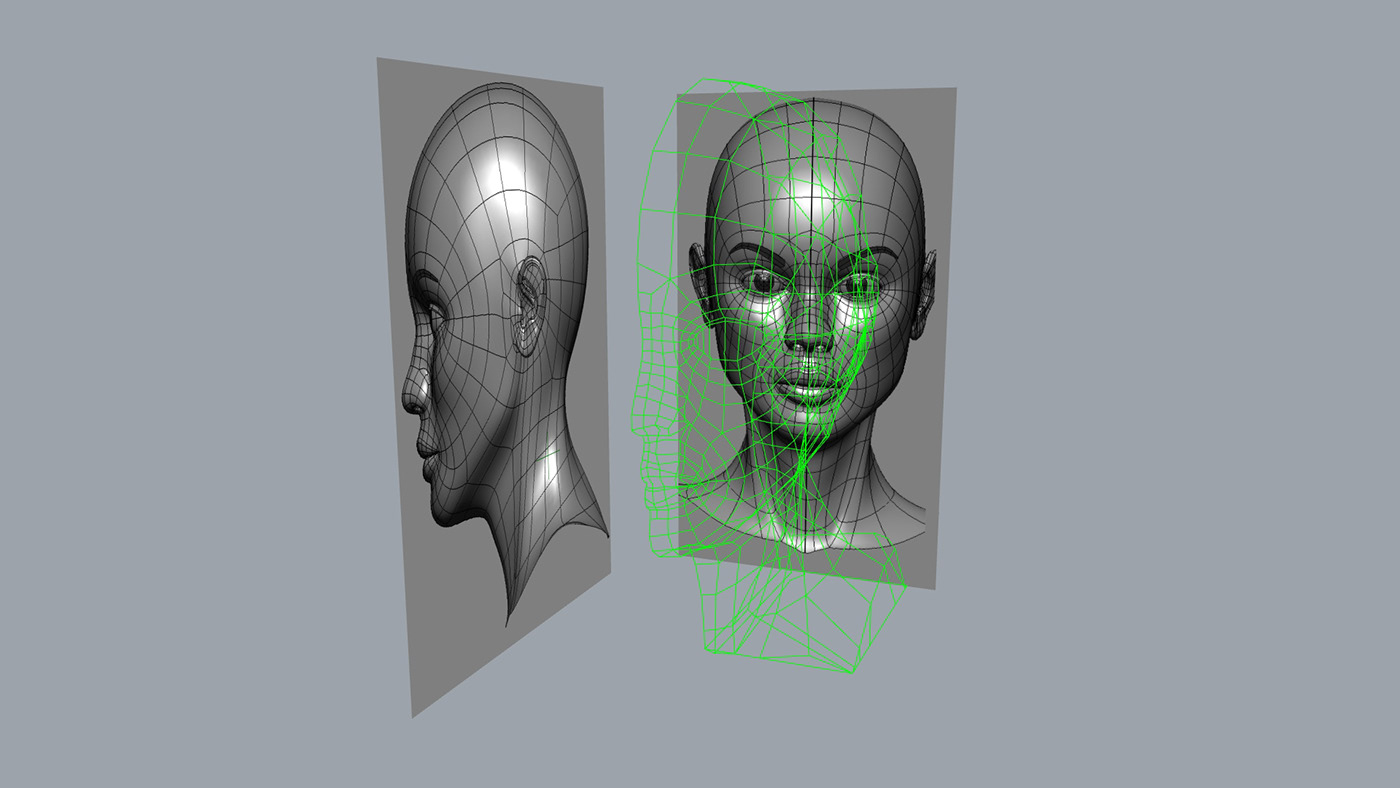
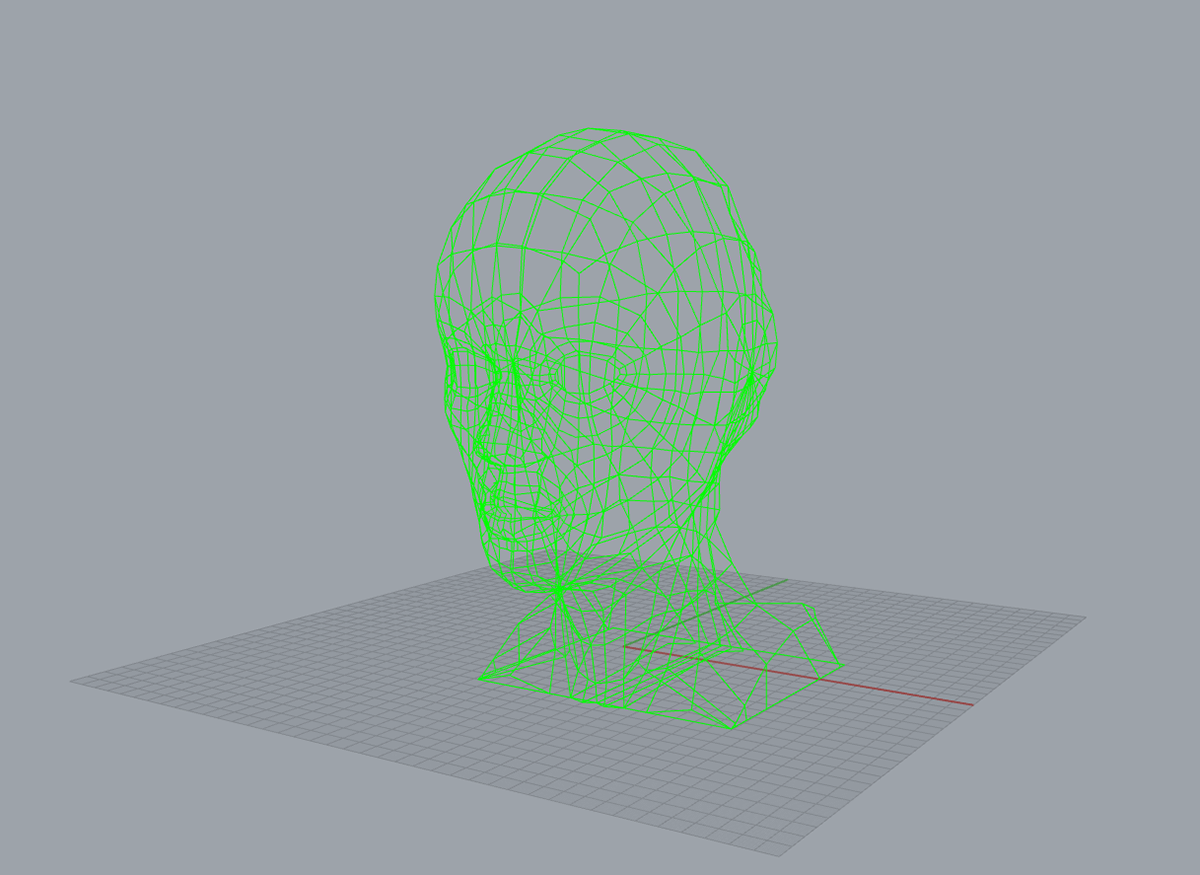
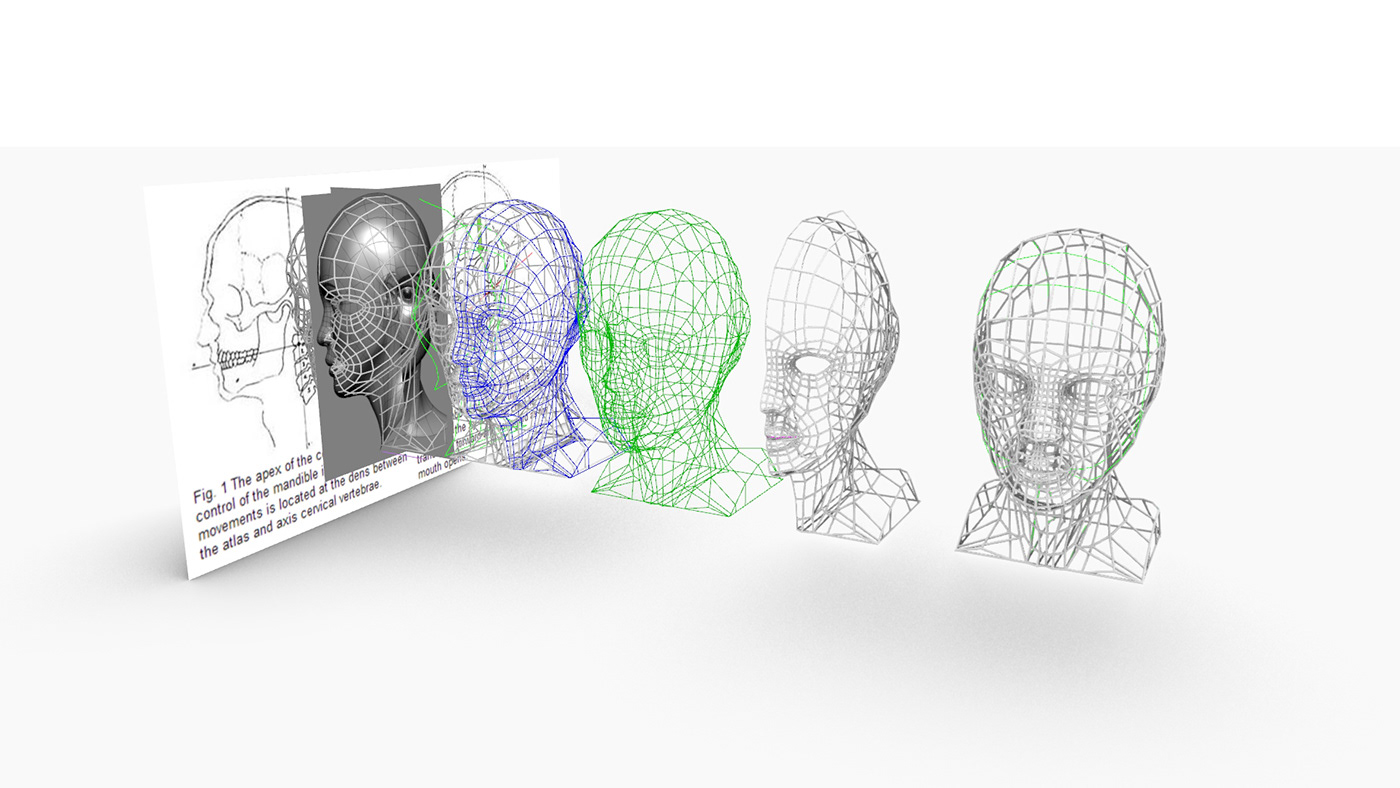
The 3D model was created by referencing human faces, then curves were used to create the low poly aesthetic that is prevalent in sci-fi movies. Individual kinetic parts will be exported and printed.
This documentation will serve as a guide on my ideation process of how I tackle this project.
Specifications:
Minimum Scale(in cm):
Head Lateral width: 14.8 | Eye-to-chin height: 8.1
Head height: 16.7 | Ear width: 2.2
Ear height: 4.5 | Head frontal width: 12.0
Head circumference: 42.8
Equipment List:
- FormLab's Form 2 SLA Printer
- Clear SLA Filament
- 0.6mm Nylon String
- 2x Servos
- Raspberry Pi 3B+
- Sandisk 16GB MicroSD Card
- Kinobo Mini Microphone
- Clear Acrylic
Main Portions of Research x Fabrication x Mechanism x Network Integration
![]()
The idea initially was to create a system similar to kinetic sculptures through the use of strings that adjust their Y axis to create movement but because of the limitations of the axises, it might seem dead or too mechanically stiff.
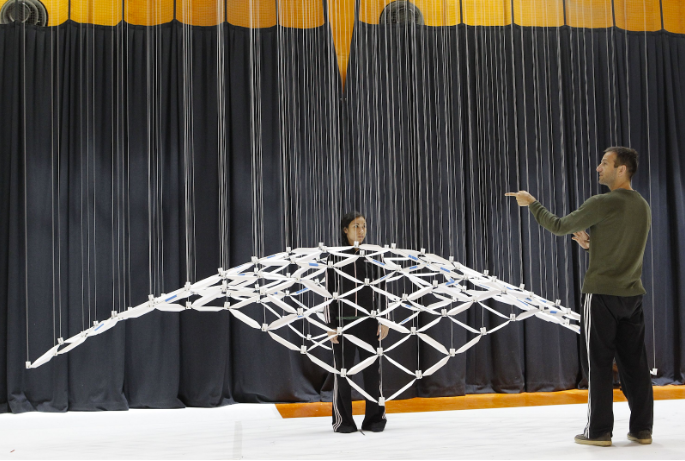
After consultation, it seems like a living hinge system on places of movement would help the movements. The idea is adopted from animatronics and would require 3D printing on elastic or flexible filament(ninjaflex) for those portions. The portions would be the mouth(specifically the lips), the eyes(specifically the eyelids) and the point of rotation for the head.
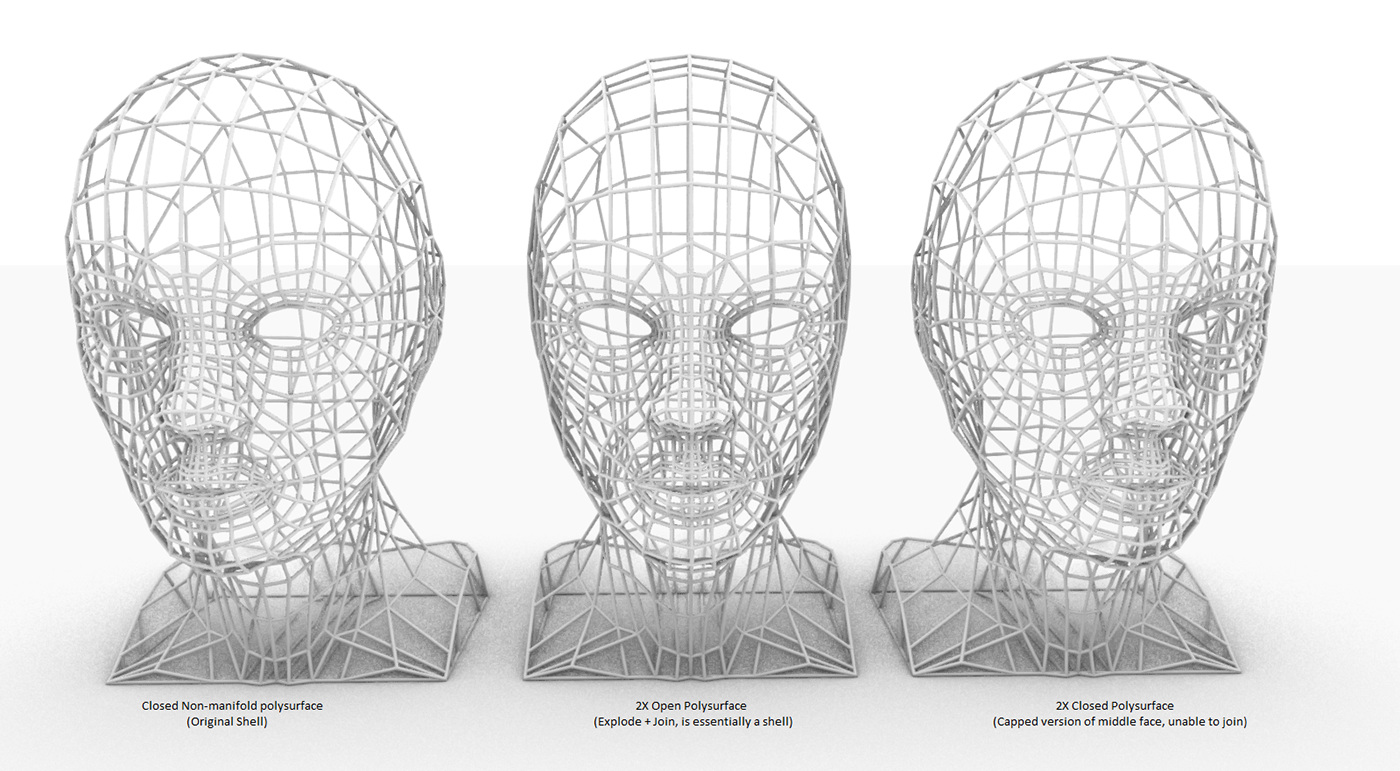
The rest of the portions would be 3D printed. The frames or skeletal poly structure would be 3D printed with PLA or resin printed in a clear filament. The structures will be hollow and held together by Nylon threaded through to pull flexible portions.
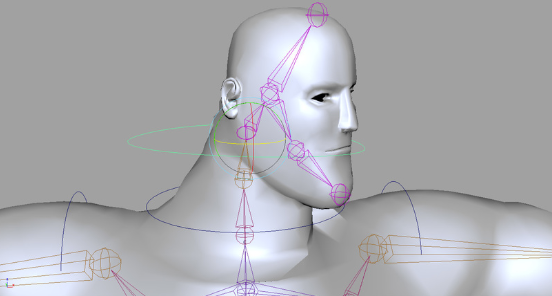
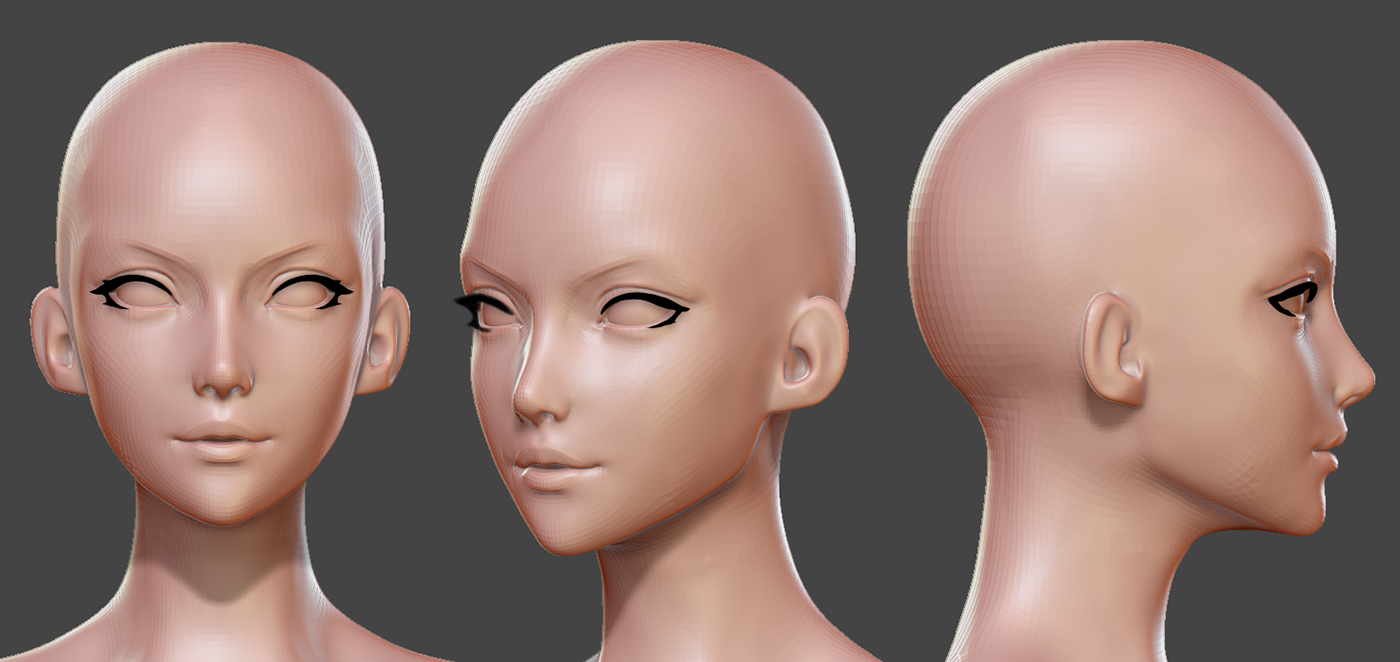
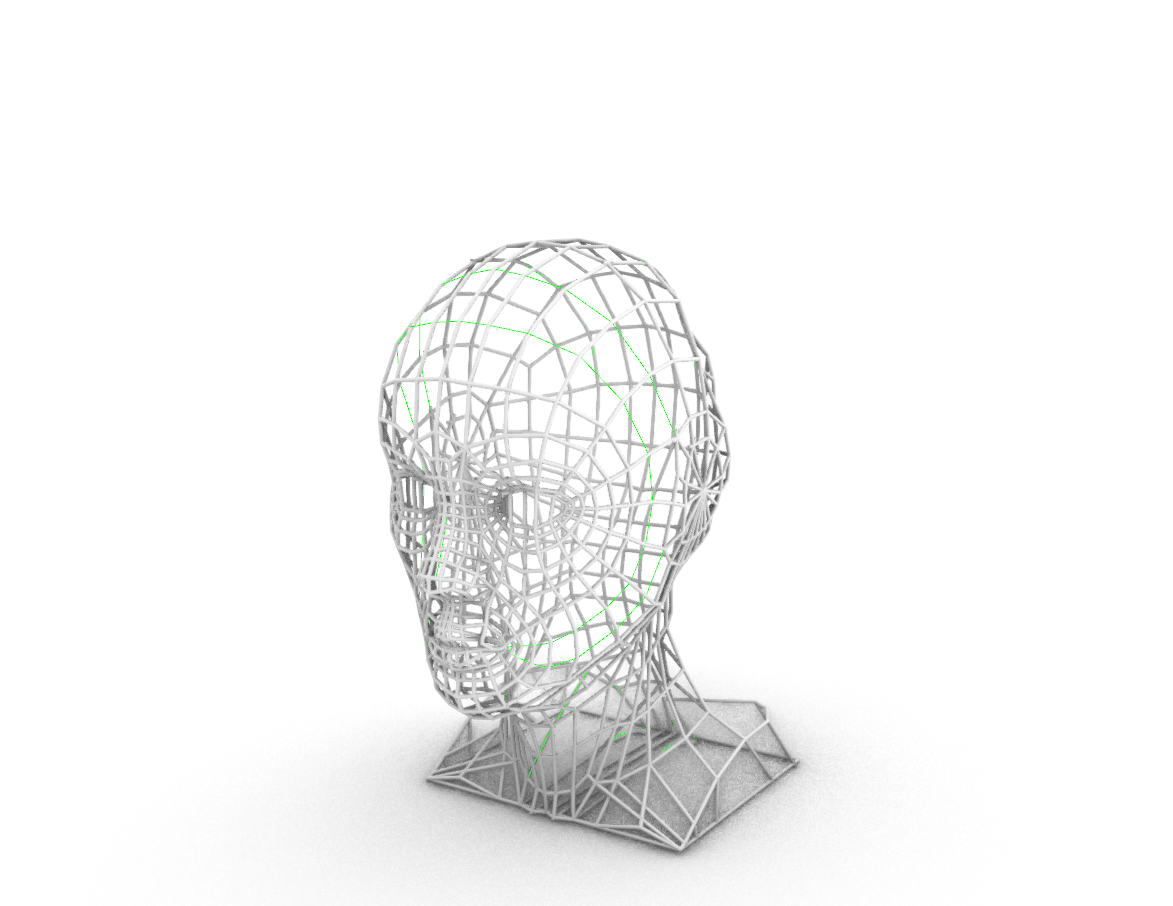
(not accurate representation of final outcome, only used for visualization)
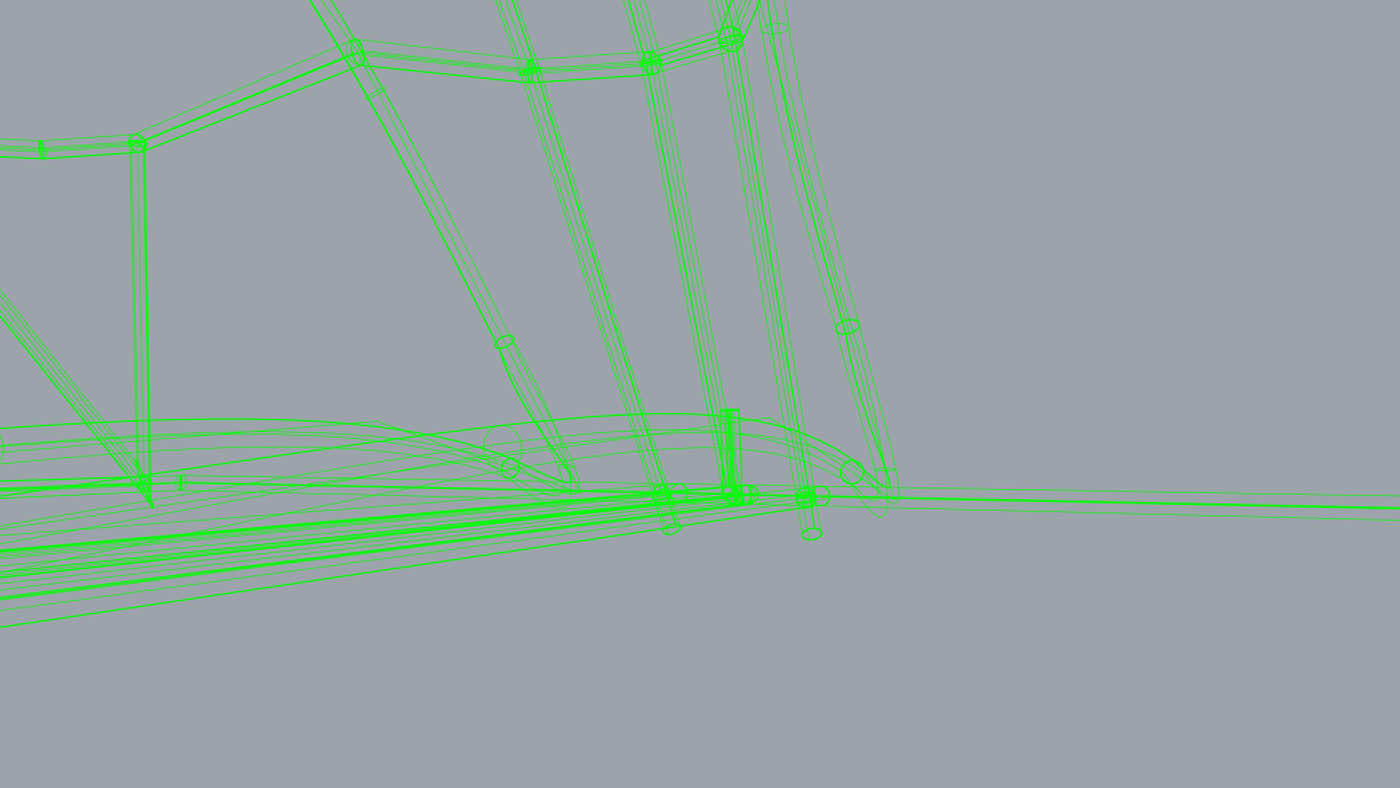
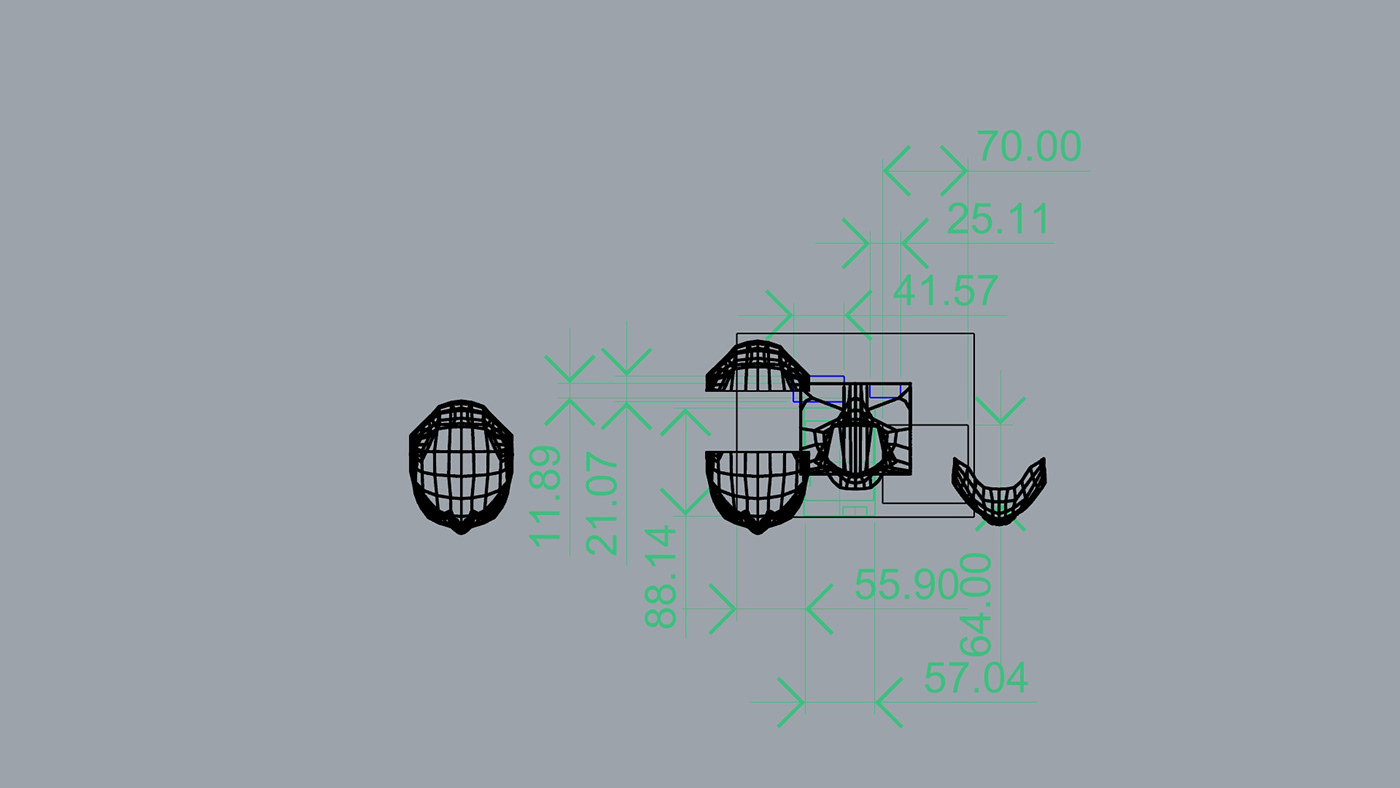
The structure will be generally stable and unmovable from chin down, providing a base that holds structural integrity to support the entire sculpture. A solid structure should extend to the back of the head as well as there are no points of pivot.
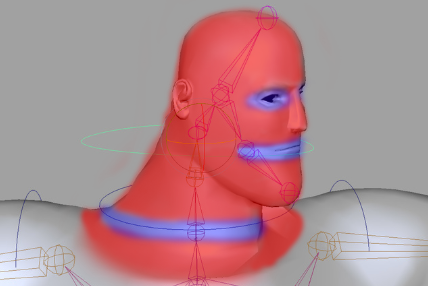
![]()
With the red parts indicating a solid PLA/SLA structure whilst the blue parts indicating a ninjaflex flexible joint to enable turns.
Nylon wires will be fed through all the tubes with joints being attached to the points of pivot on the Ninjaflex to creation movement.
Fabrication method could be a negative casting method to create a hollow shell for the nylon string to pass through.
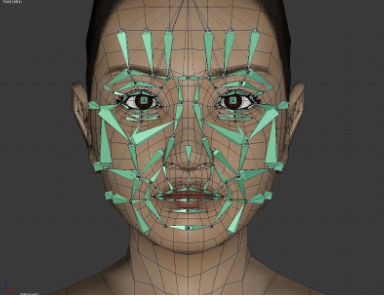
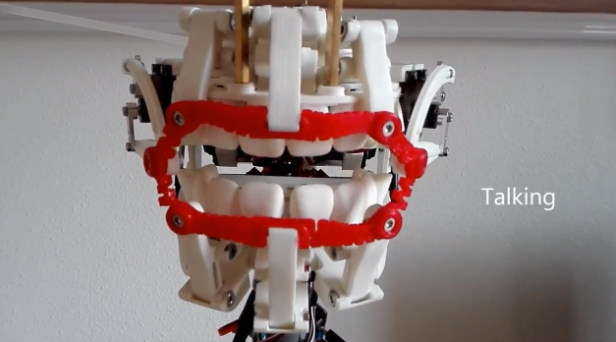
ADAM will have 4 points of motion, head turn, head tilt, eye blink/squint, mouth open/close.
Facial mechanisms will largely depend on nylon strings being rigged to their respective motors. The eyes and mouth will work on a simple pull and release mechanism that is commonly used in costuming mechanism.

Because of the nature how the SLA works, it can be stretched and when pulled by a contracting nylon string, it will automatically close. The nylon will be threaded through the 3D printed tubes to reach their respective destinations.

![]()
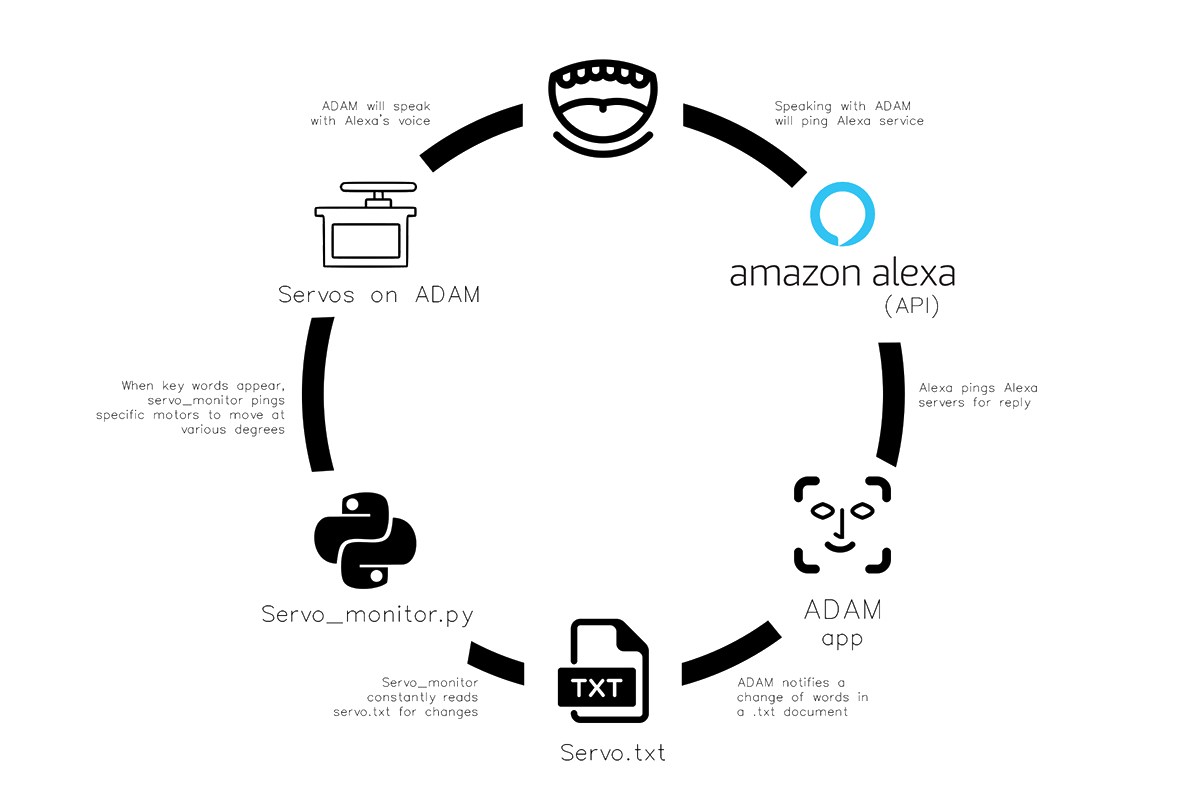
The Raspberry Pi 3B+ will be integrated with Amazon Alexa application.Configuration of Alexa onto Raspberry Pi.Control DC Stepper Motor using Raspberry Pi.
Motor Control:Wake(upon activation) - Head Tilt Up - Pull onceSleep(upon deactivation) - Head Tilt Down - Release onceTalk(upon command) - Mouth opens and closes - Pull and release loopBlink(every 10 seconds) - Eye opens and closes - Pull and release once
![]()
SPECIAL THANKS
(Without them, this project would've never been such a success)
Adam Bachman, Amanda Agricola, Tim Devoe, Paul Mirel, Helvetosaur, Katie Zawadowicz, Benjamin Soh, Yeo Ying Zhi
The idea initially was to create a system similar to kinetic sculptures through the use of strings that adjust their Y axis to create movement but because of the limitations of the axises, it might seem dead or too mechanically stiff.
After consultation, it seems like a living hinge system on places of movement would help the movements. The idea is adopted from animatronics and would require 3D printing on elastic or flexible filament(ninjaflex) for those portions. The portions would be the mouth(specifically the lips), the eyes(specifically the eyelids) and the point of rotation for the head.
The rest of the portions would be 3D printed. The frames or skeletal poly structure would be 3D printed with PLA or resin printed in a clear filament. The structures will be hollow and held together by Nylon threaded through to pull flexible portions.
(not accurate representation of final outcome, only used for visualization)
The structure will be generally stable and unmovable from chin down, providing a base that holds structural integrity to support the entire sculpture. A solid structure should extend to the back of the head as well as there are no points of pivot.
With the red parts indicating a solid PLA/SLA structure whilst the blue parts indicating a ninjaflex flexible joint to enable turns.
Nylon wires will be fed through all the tubes with joints being attached to the points of pivot on the Ninjaflex to creation movement.
Fabrication method could be a negative casting method to create a hollow shell for the nylon string to pass through.
ADAM will have 4 points of motion, head turn, head tilt, eye blink/squint, mouth open/close.
Facial mechanisms will largely depend on nylon strings being rigged to their respective motors. The eyes and mouth will work on a simple pull and release mechanism that is commonly used in costuming mechanism.
Because of the nature how the SLA works, it can be stretched and when pulled by a contracting nylon string, it will automatically close. The nylon will be threaded through the 3D printed tubes to reach their respective destinations.
The Raspberry Pi 3B+ will be integrated with Amazon Alexa application.Configuration of Alexa onto Raspberry Pi.Control DC Stepper Motor using Raspberry Pi.
Motor Control:Wake(upon activation) - Head Tilt Up - Pull onceSleep(upon deactivation) - Head Tilt Down - Release onceTalk(upon command) - Mouth opens and closes - Pull and release loopBlink(every 10 seconds) - Eye opens and closes - Pull and release once
SPECIAL THANKS
(Without them, this project would've never been such a success)
Adam Bachman, Amanda Agricola, Tim Devoe, Paul Mirel, Helvetosaur, Katie Zawadowicz, Benjamin Soh, Yeo Ying Zhi